—
—Basic
Principle
—Short pulses of sound
vibrations are transmitted from the bottom of the ship to the seabed. These
sound waves are reflected back by the seabed and the time taken from
transmission to reception of the reflected sound waves is
measured. Since the speed of sound in water is 1500 m/sec, the depth
of the sea bed is calculated which will be half the
distance travelled by the sound waves.
—
—
—The received echoes
are converted into electrictal signal by the
receiving transducer and after passing through the different stages of the
receiver, the current is supplied to stylus which burns out the coating of the
thin layer of aluminium powder and produces
the black mark on the paper indicating the depth of seabed.
—
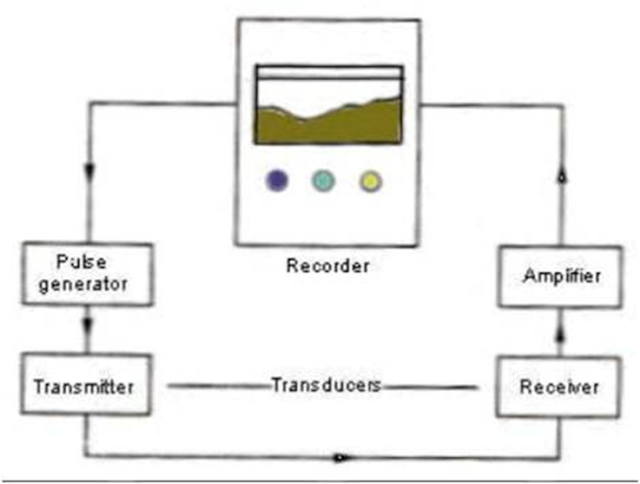
—COMPONENTS
—Basically an echo
sounder has following components:
—Transducer – to
generate the sound vibrations and also receive the reflected sound vibration.
—Pulse generator – to
produce electrical oscillations for the transmitting transducer.
—Amplifier – to
amplify the weak electrical oscillations that has been generated by the
receiving transducer on reception of the reflected sound vibration.
—Recorder - for
measuring and indicating depth.
—
—CONTROLS
—An echo sounder will
normally have the following controls:
—Range Switch – to
select the range between which the depth is be checked e.g. 0- 50 m,
1 – 100 m, 100 – 200 m etc. Always check the lowest range
first before shifting to a higher range.
—Unit selector switch
– to select the unit feet, fathoms or meter as required.
—Gain switch – to be
adjusted such that the clearest echo line is recorded on the paper.
—
—
—Paper speed control –
to select the speed of the paper – usually two speeds available.
—Zero Adjustment or
Draught setting control – the echo sounder will normally display the depth
below the keel. This switch can be used to feed the ship’s draught
such that the echo sounder will display the total sea depth. This
switch is also used to adjust the start of the transmission of the sound pulse
to be in line with the zero of the scale in use.
—Fix or
event marker - this button is used to draw a line on the
paper as a mark to indicate certain time e.g. passing a navigational mark, when
a position is plotted on the chart etc.
—Transducer changeover
switch – in case vessel has more than one switch e.g. forward and aft
transducer.
—Dimmer – to
illuminate the display as required.
—
—Pulse Length
—The pulse length is
the duration between the leading edge and the trailing edge.The pulse length
determine the minimum distance that can be measured by the echo sounder.The minimum measurable
distance will be equal to the half of the pulse length.for the shallow water short pulse is used while for the
deeper water long pulse is used.
—
—Pulse repetition
frequency
—This is the nos of pulse transmitted
per second.This determines the
maximum range that can be measured by the echo sounder.The PRF is normally automatically selected and changes as
the range scale is changed.for lower range,High PRF is used whereas
for the higher range ,low PRF is used.
—
—TRANSDUCER
—Electrostrictive
transducer
—This type makes use
of the special properties of crystals (e.g. crystals of barium-titanate and lead zirconate). If an alternating
voltage is applied to the opposite faces of a flat piece of one of the above
materials, the crystal will expand and contract, and hence vibrate creating
sound waves for as long as the
vibrations continue. The process is reversible, i.e. when varying pressure from
a returning echo, is applied to the opposite faces, an alternating
voltage is generated across the faces and the same can be further amplified and
used to activate an indicator.
—
—
—Magnetostrictive transducer
—In this type, the use
is made of the magneto-striction effect which is
a phenomenon whereby magnetization of ferromagnetic materials produce a small
change in their dimensions, and conversely the application of mechanical
stresses such as weak pressure vibrations, as from an echo to them, produce
magnetic changes in them; e.g. a nickel bar when placed in the direction of or
strength of the magnetic field. If the nickel bar is placed in a coil with an
alternating current flowing through it (a solenoid), the varying current and
magnetic field will cause the ends of the bar to vibrate and hence create a
sound wave. This is what happens when the transducer is transmitting.
—
—Echo sounder
—SITING OF TRANSDUCER
—Factors affecting the
siting of transducer:
AIR BUBBLE & CROSS NOISE: The transducer should be
installed in a position where there is very less chance of formation of the air
bubbles.Air bubbles will act as
large reflectors of transmitted energy if lot of air bubbles are formed close
the transducer.This will also create the
cross noise.
There are
various locations on the ship where formation of air bubble is less e.g.
a) On large ,fast,deep draft ships-1/8 to ¼ L of the ship from forward
—
—On medium speed
ships- forward most portion of the ship.
—On slow cargo
ships-1/4 L from aft
—On oil tanker
–normally forward end of the E/Room bulkhead.
—Ranging
—In echo sounder the
stylus is moving with certain constant speed and transmission takes place when
the stylus passes the zero marks.When the higher range is selected the speed of the stylus is
reduced as stylus has to paper for the longer duration.This system is called the ranging.
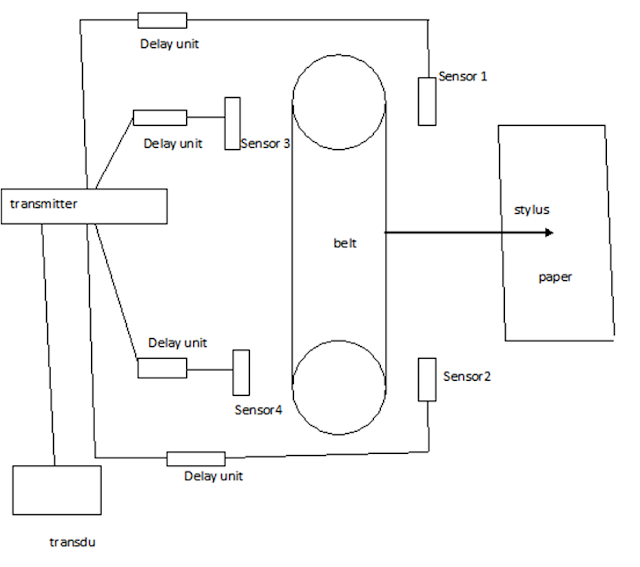
—PHASING
—In phasing the speed
of the stylus motor remains constant.In stead of changing the speed of the stylus,the transmission point
is advanced.
—The sensors are
positioned around the stylus belt.The magnet generates the pulse when it passes the sensors
which in turns activate the transmitter.
—PHASING
—ERRORS OF ECHO
SOUNDER
—1.Velocity of
propagation in water:
The velocity
taken for the calculation of the is 15oom/sec.The velocity of the sound wave is changing due to the
change of the salinity and temperature of the sea water. As velocity is varying
hence depth recorded will be erroneous.
2. STYLUS SPEED ERROR:The speed of the stylus is such that the time taken by the
stylus to travel from top to bottom on chart is same as the time taken by sound
wave to travel twice the range selected.
—
but due to
fluctuation in voltage supplied to stylus motor ,will cause error in the
recorded depth.
3. PYTHAGORAS ERROR:
This error is
found when two transducer are used one for transmission and one for reception.This error is calculated
using the Pythagoras principle.
4.Multiple ECHO:The echo may be reflected
no of times from the bottom of the sea bed,hence providing the multiple depth marks on paper.
—
—5.The thermal and
density layers:
The density
of the water varies with temperature and salinity ,which all tends to form
different layers.The sound wave may be
reflected from these layers .
6.Zero line
adjustment error:
If the zero is
not adjusted properly,it will give error in
reading
—
—CROSS NOISE:
If sensitivity
of the amplifier is high,just after zero marking a
narrow line alongwith the several
irregular dots and dashes appear and this is called cross noise.The main reasons for the
cross noise are aeration and picking up the transmitted pulse.If intensity of cross
noise is high,it will completely mask
the shallow water depths.This is controlled by
swept gain control circuit.
—
—AERATION:
When the sound
wave is reflected from the reflected from the air bubbles,it will appear as dots,this is known as
aeration.
—


.png)
.png)
.png)
.png)